

提升54倍!新颖气动增强装置助力腿式机器人实现高爆发力跳跃
腿式机器人通过模仿人类或动物双腿及多腿结构、生物特特征和运动机理实现了机体的更高灵活性和对地形的更强适应性。
相较轮式机器人和履带式机器人,腿式机器人能完成行走、奔跑、跳跃、攀爬等高动态动作。在面对山地、沙地等复杂环境和地形时,腿式机器人也可根据感知到的周围环境、障碍物,通过复杂算法进行自主决策,选择调整接触位置、调节步态并选择最佳行进路线,进而实现对更广泛地形的适应。也因此,腿式机器人在救援、检查以及非结构化环境的探索方面表现出巨大潜力。
但同时,受尺寸和重量影响腿式机器人对关节的性能要求比较高,关节的爆发力强度直接决定了腿式机器人运动性能的发挥程度。
前不久,来自威斯康星大学麦迪逊分校的威斯康星快速腿式运动实验室的研究人员为传统电动机驱动的腿式机器人提出了一种新颖气动增强系统,用于能量积累和放大。
该装置可增加间歇功率密度,助力腿式机器人进行不频繁的爆发性跳跃。通过在定制设计的单腿跳跃机器人上验证证明,在无需任何额外动力源的前提下,借助该研究团队所提出的这一新颖气动增强系统,机器人可实现每个周期功率放大的高爆发力跳跃是电动机单独驱动功率的5.4倍。
据了解,研究团队提出的气动增强系统由气动泵、储气罐、气动执行机构组成。可在机器人负功期间积累能量,并在多个周期中进行存储。通过该系统,电动泵将动能转化为势能,并以压缩空气的形式泵入储罐。
作为系统的集成部分,电动泵在机器人正常运动活动期间执行能量转换,不需要特殊的泵送阶段。每个循环泵送额外的空气增加储气罐中的势能,当储蓄罐达到所需压力(足够的势能)时,可释放空气,快速移动气动执行器(转换回动能),该气动执行器与原始执行器结合使用可放大爆发性运动行为的功率输出。
同时,该气动增强系统可在任何所需的时间内储存能量,可适用于大多数腿式机器人和两个表面之间具有非恒定接触的大多数机器人。
气动增压系统:两级活塞泵(Giyo GM043)将空气通过止回阀(防止加压空气流回泵)泵入储罐,储罐中的压力由两个传感器 (一个模拟传感器,一个数字传感器)监控。压力达到预设目标压力后,能打开电磁阀(Norgren V60),快速将空气释放到气动执行器(Airpot 2KS325)。气动执行器安装在泵旁边,因此两者的行程设置为相同,最大位移为105毫米。
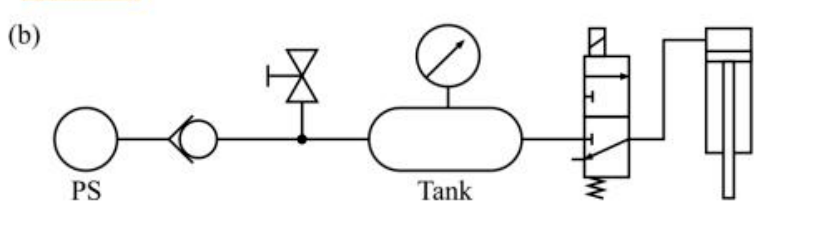
泵执行器:活塞泵移动气缸内的活塞以压缩空气。系统的两级 (伸缩式) 活塞泵包括两个同心活塞(级),可在较小的外观尺寸中增加冲程 。在泵送过程中,第一级(工作直径,14mm) 启动,内部气压升高。短暂过渡后,第二级(工作直径,17mm)启动,按照压缩曲线进一步提升内部空气压力。当泵压力超过储罐压力时,止回阀打开,空气被泵入储罐。在此泵送之前,已完成所有压缩气体的工作,并且未向罐添加任何能量。为了在气动执行过程中使力最大化,研究团队选用了大直径(32.5mm)气动执行器 (力=压力·面积)。
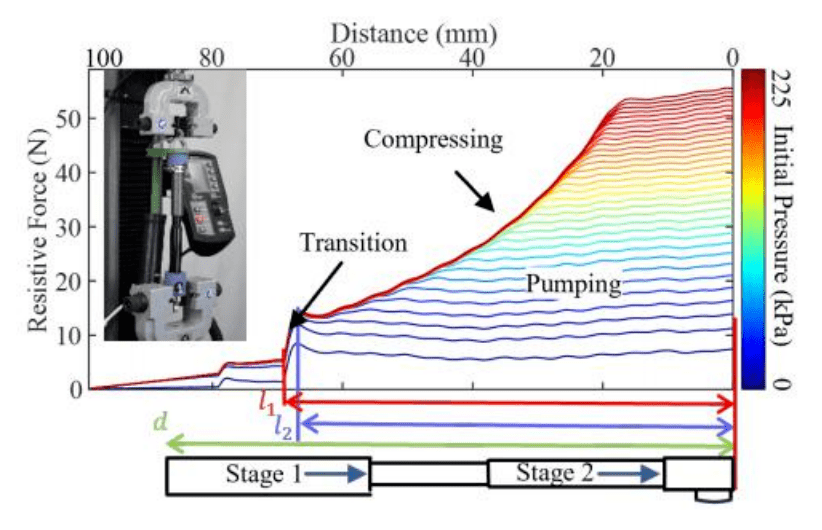
气动泵的阻力与压缩距离关系图:泵在第一级和第二级之间移动,两级之间的过渡距离很短。泵的阻力勋勋单一曲线阶段),直到止回阀被触发,此时力曲线在增加压力时发生偏离(第2阶段)。此外,第2阶段的泵阻力取决于初始罐压力。上图显示了泵在拉伸测试仪上的实验设置
储罐设计和系统平衡:随着释放的空气取代气动执行器,系统容积(储罐+执行器) 增加,总压力降低,由此减少了可用于做功的力。因此,目标罐容积至少是最大致动器容积的两倍。最终罐(质量,205g)的体积是执行器体积的2.3倍。选择小直径 (内径1.5毫米) 泵至储罐的管道,以最大限度地减少止回阀打开之前要压缩的空气量。在储罐和气动执行器之间选择了大型电磁阀和大直径管道(内径6毫米),以最大限度地提高流量和驱都选择了最短的实际管道长动速度。在所有情况下,都选择具有小活塞直径 (14、17毫米) 的泵,以中等施加力(压力=力面积) 产生高压。两级设计增加了总冲程长度,提高了泵送速率。
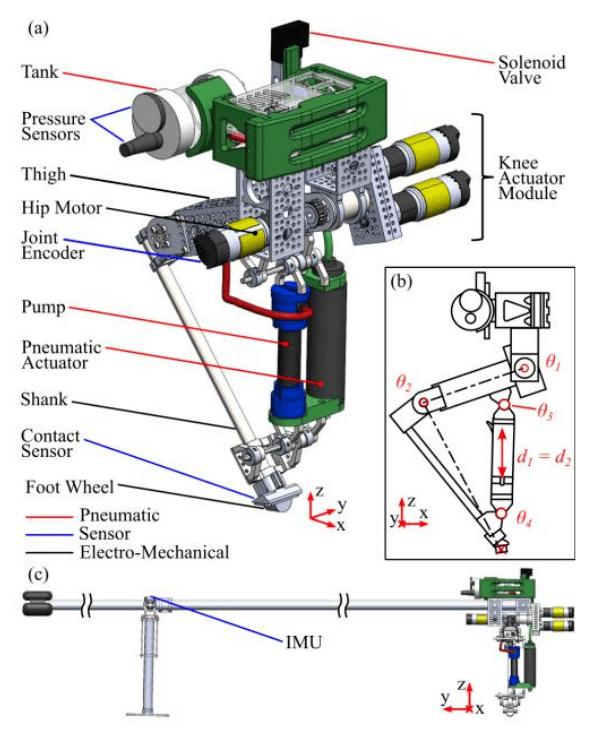
为了使用所提出的气动增强来提高传统腿式机器人的功率密度,研究团队以开源机器人Hoppy为基础架构,通过适度修改构建了初始版无增强机器人。
机械部件:机器人是一个单腿料斗,包括两个连杆和两个关节,其驱动关节和连杆分别选用了有刷直流电机模块和Gobilda现成的模块化部件,机器人的运动也使用类似模块化部件的吊杆进行平面化。
考虑到实验时需机器人能够在没有明显配重的情况下跳跃,且膝关节在动态跳跃过程中需要更高的关节扭矩,研究团队选用了两个可用的直流电机模块(最大速度223rpm,最大扭矩3.728Nm)(通过齿轮连接)来驱动膝关节,并将膝关节电机置于上宽部减少腿部惯性。
电机旋转时通过皮带传动以1.5:1的减速比传输至膝关节。为留出空间方便直接用气动增强装置,在进行机器人设计时,研究团队也对平行弹簧进行了移除,并在机器人脚下加了一个轮子让脚可以沿着吊杆的方向滑动。
电气元件:为实现实时控制,研究团队使用了TILaunchPad微控制器(LAUNCHXL-F28379D,200MHz双C28xCPU),该微控制器在Simulink (C2000封装) 中进行编程。TILaunchPad微控制器提供了足够的计算能力及与传感器和执行器的低级接口,以此来实现了机器人上1kHz的目标控制频率。有刷直流电机通过VNH5019电机驱动器(12A、55-24V)通过PWM来控制。电机具有集成旋转编码器(每转751.8个脉冲),可使用TI板直接读取。脚上安装了力传感电阻器 (FRS,FlexiForceA201,11kg) ,用于检测跳跃过程中地相和空中相之间的接触过渡。IMU(SparkFunICM-209489DOFIMU)安装在动管顶部,用于测量动臂的转速,臂杆可用于计算机器人的局部线速度。
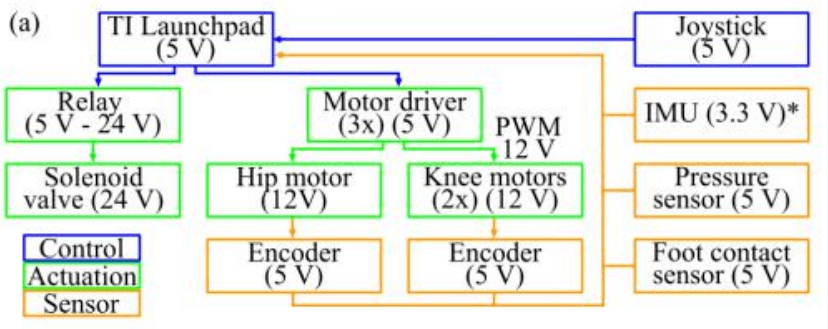
同时,研究团队也配置了USB-C主机扩展板(SparkFun USB-C Host Shield),可通过主机扩展板连接到Arduino UNO的操纵杆控制器(VOYEE有线PC控制器),实现实时命令运动任务参数。Arduino UNO则处理来自IMU和操纵杆控制器的信号,并通过串行通信将数据传输到TI板。
在气动系统中,跳跃机器人腿部收缩受到泵的阻力和执行机构的摩擦力的阻碍,腿部伸展受到泵的摩擦的阻碍并通过气动执行机构的增强。因此,为了系统地控制跳跃,研究团队首先对气动增压系统ID进行了确定。
通过提出泵送阻力理论模型来计算泵中的压力变化,研究团队实现了对压缩过程中阻力的计算,并提出一个基于实验装置上阻力的实际测量数据驱动模型。为了表征两级泵在不同罐压力下的力位移响应,研究团队将泵与罐一起安装在拉伸测试仪上,并以恒定速度进行泵送,进而获得了数据驱动模型。


考虑到当泵在罐中产生压力时,气动执行器充当摩擦最小的被动棱柱接头。一旦罐内压力达到所需水平电磁阀就会被触发,实现气流从灌流到气动执行器进而延伸到腿部,研究团队亦对所施加的驱动力通过组合两部分进行准静态模型和瞬态动力学模型建立,并就集总气动力进行了计算。
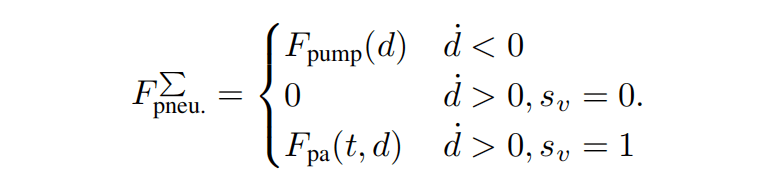
通过将所识别的泵致动器模型直接集成到机器人的规范刚体动力学模型内的致动器动力学中。研究团队将泵和气动执行器一起建模为棱柱接头,它们具有不一样的驱动力模型,具体取决于是否机器人使用泵来储存能量或使用执行器进行爆炸性跳跃。因此,机器人具有闭环运动链,其建模与机器人Cassie类似。该机器人仍然具有两个自我自由度(DOF),其中腿部长度由膝部电机和气动执行器驱动。对于跳跃行为,动态是混合的,由两个阶段组成:空中阶段和站立阶段。从空中阶段到站立阶段的过渡是离散影响图,而从站立阶段到空中阶段的过渡是平滑的。
空中阶段和站立阶段都具有连续动力学,其Euler-Lagrangian方程可以简洁的表示为:

假设机器人触地时脚和地面之间的冲击是纯塑性的,撞击后状态满足完整约束,撞击的冲量会产生动量变化:

动力学确定后,研究团队提出了运动规划和反馈操控方法,用于在气动增强腿式机器人上实现动态跳跃行为。研究团队定义了两种跳跃任务:实现能量存储的规则周期性跳跃和最大化跳跃高度的爆炸性跳跃行为。运动轨迹通过不同的成本函数和约束变化来优化,并使用相同的低级操控方法来实现。
通过实验验证,该研究团队实现了使用机器人上的气附件在周期性跳跃循环中存储能能量增强机器人爆发性跳跃行为。对机器人实际跳跃轨迹与模型的优化轨迹作比较的根据结果得出:垂直定点高度平均达到4.3厘米(最大为6.1厘米,最小为2.9厘米),与预期高度相当吻合。
结合气动和电机驱动精准预测顶点高度,机器人能够在相同罐压下平均跳跃23.4cm(最大高度为24.6cm,最小高度为22.6cm),这表明每个跳跃周期的功率放大了一个系数(约5.4倍)。有必要注意一下的是,常规跳跃期间存储的能量也可助力机器人实现连续增强跳跃和跳跃到平台上等其他高性能行为。
该研究团队表示,未来团队将逐步优化和扩展设计和控制框架。据推测,该气动增强系统能集成到执行器中,以最大限度地提高效率和功率密度。具有精心控制的阀门的泵和执行器可以被视为在多个周期中存储和释放能量的弹簧,并能灵活地调节每个周期中的能量流,即向系统耗散或注入可控量的能量。与适当的操控方法相结合将有可能使腿式机器人能够以较低的机动化要求扩展其操作范围。返回搜狐,查看更加多
上一篇:特瑞斯:轴流式气动调理阀的开发与研讨等多个研制项目已完结
下一篇:关于机滤止回阀的问题